Appearance
设置钉钉机器人
钉钉机器人可以作为 Loomy 远程控制的消息入口之一。完成配置后,你可以通过钉钉向 Loomy 发送指令,并接收执行结果。
适合什么场景
- 通过钉钉单聊或群聊远程触发任务
- 在手机上查看 Loomy 的执行结果
- 不在工位前时快速确认当前任务状态
配置前准备
在开始配置前,建议先确认以下事项:
- 已安装并登录 Loomy
- 已了解远程控制的基本使用方式
- 已准备好钉钉机器人接入所需的相关配置项
- 当前设备可以保持 Loomy 在后台运行
基本配置流程
1.登录钉钉开放平台:https://open-dev.dingtalk.com/
进入「应用开发」→「钉钉应用」→「一键自动创建 OpenClaw 机器人应用」,复制 Client ID 和 Client Secret。
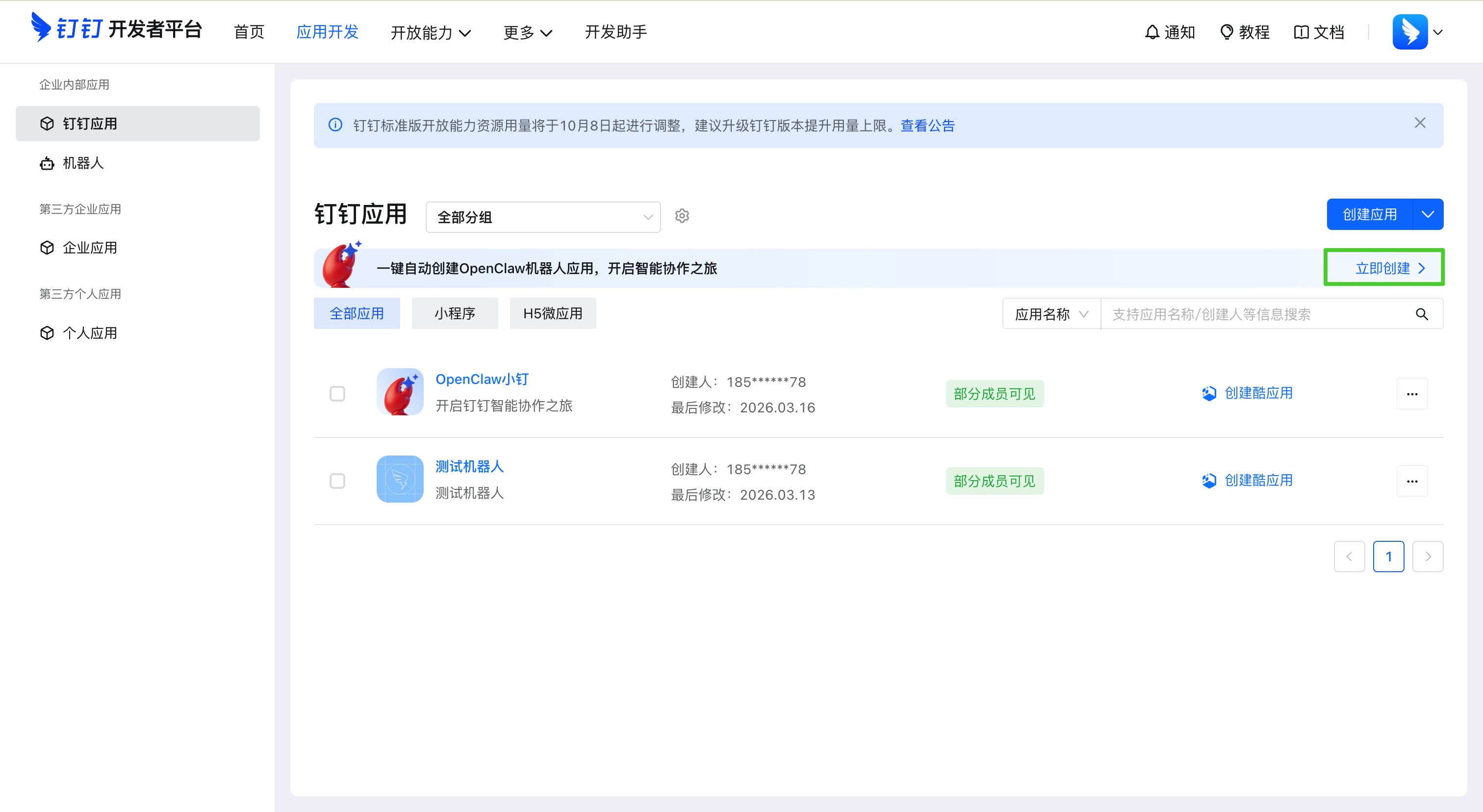
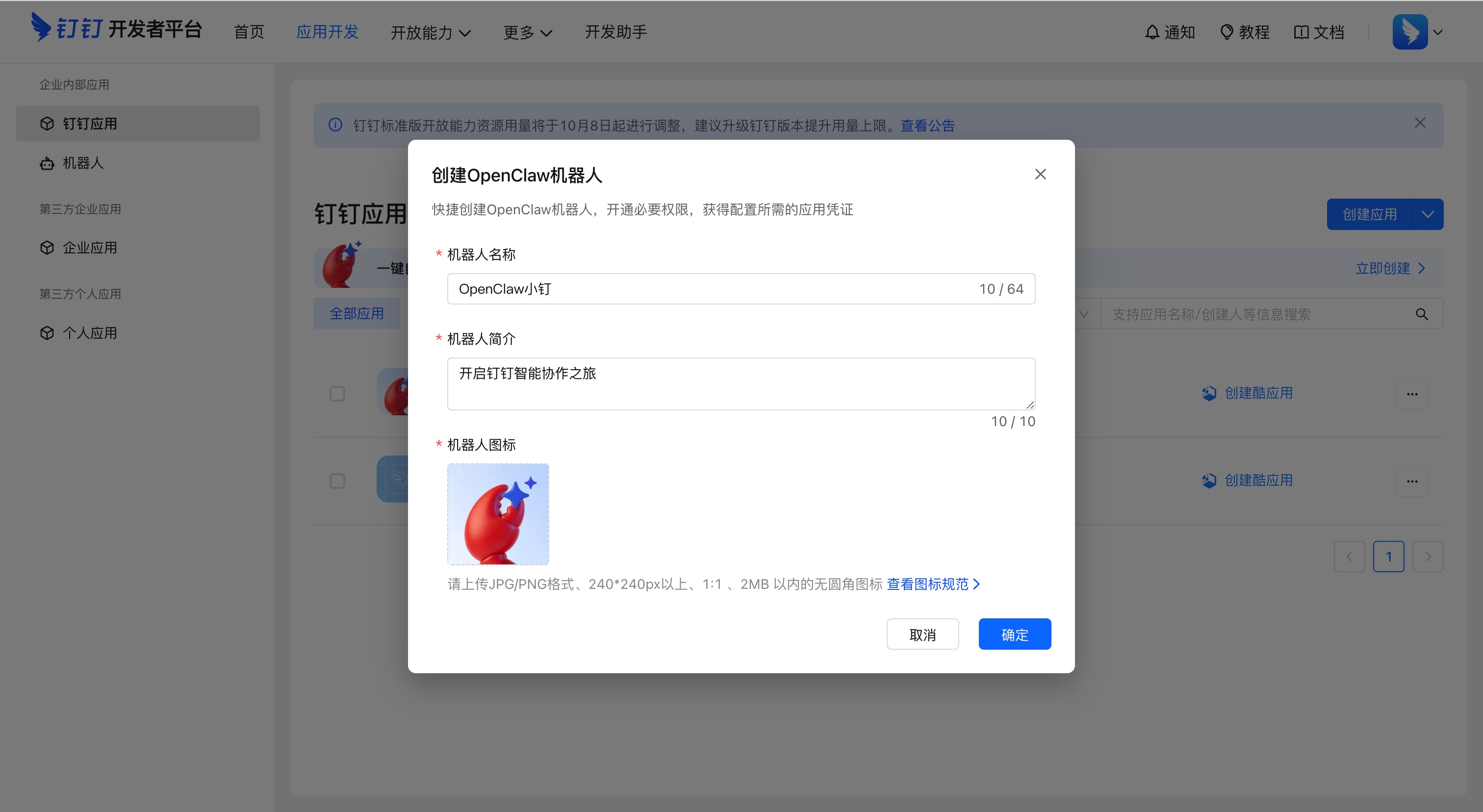
确认后自动发布第一个版本,可获取 Client ID 和 Client Secret。
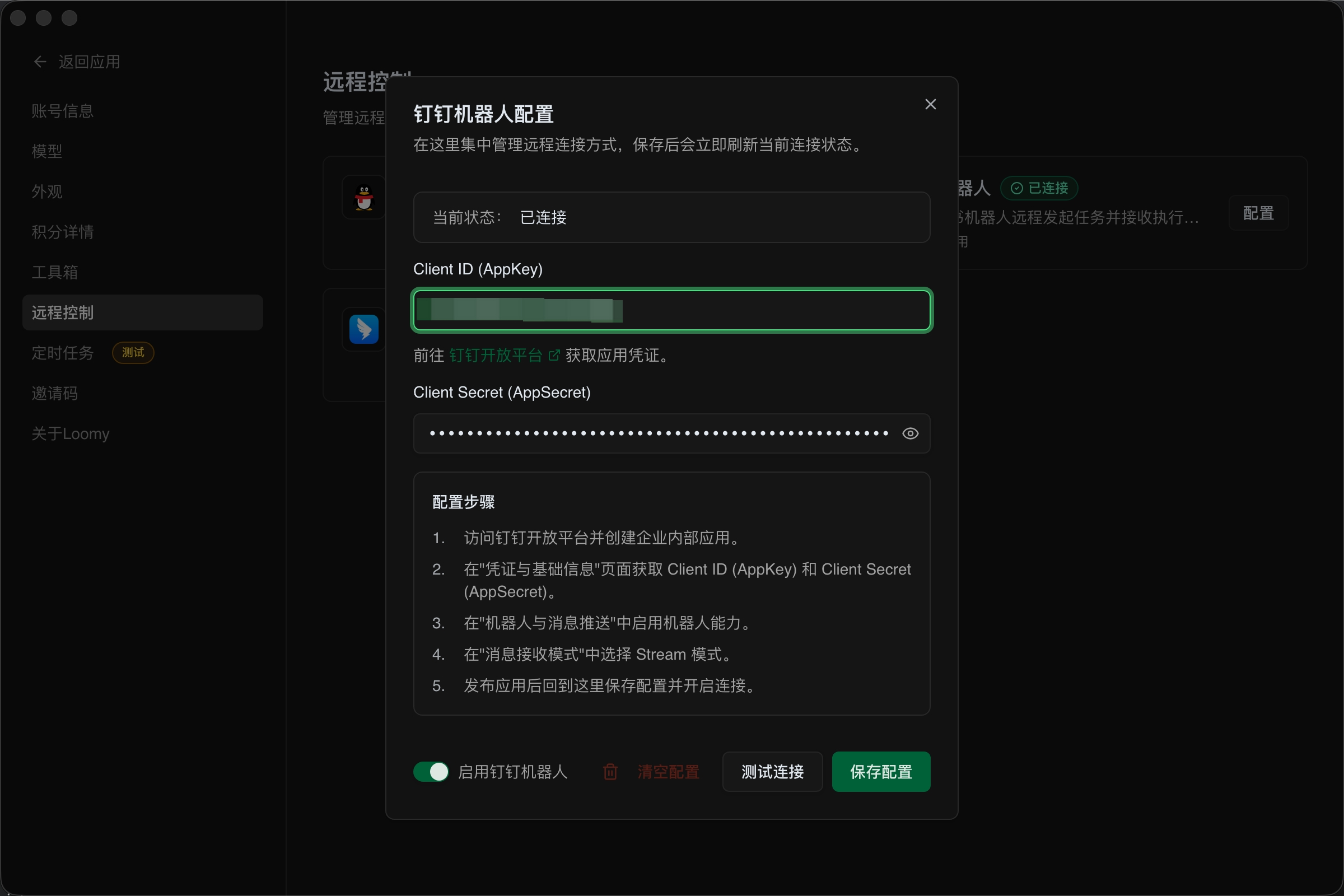
2.将获取的 Client ID 和 Client Secret 填入 Loomy 机器人配置信息中,点击启用钉钉机器人,测试连接,保存配置。
3.点击事件订阅,选择 stream 推送模式,点击已完成接入,验证连接通道。验证成功后可自由选择事件,保存后发布新版本。

4.打开你的钉钉,出现新对话窗口,显示机器人已创建成功,可以开始对话啦~
配置完成后可以做什么
完成接入后,你通常可以通过钉钉:
- 向 Loomy 发送远程指令
- 查询任务执行状态
- 获取任务结果或错误反馈
- 在部分场景下触发预设流程
注意事项
后台运行要求
钉钉机器人接入后,要想正常接收消息并执行任务,仍然需要保证 Loomy 在后台运行。若应用被完全退出,远程消息将无法正常触发执行。
常见问题
配置成功后为什么没有响应?
建议优先检查 Loomy 是否仍在后台运行、钉钉机器人配置是否保存成功,以及当前消息通道是否具备正常收发能力。
Stream 模式和 HTTP 模式怎么选?
推荐使用 Stream 模式。它不需要公网 IP 或域名,配置更简单,适合大多数场景。HTTP 模式需要你提供一个可公网访问的回调地址。
钉钉机器人可以执行所有本地操作吗?
是否可以执行,取决于你当前授予 Loomy 的权限、已接入的工具能力以及具体任务本身的风险等级。